
![]()
![]()
![]()
![]()
A szkenner felépítés, és meghajtás lehetőségei
Az eltérítő rendszer egy elektromechanikus átalakító, mely a beérkező analóg jeleket elmozdulásra, illetve pozícióra alakítja át. Ez az átalakítás általában elektromágneses úton történik. Sokféle megoldás létezik a problémára, bár a nagy cégek elég erősen egy jól bevált elképzelést fejlesztenek és gyártanak.
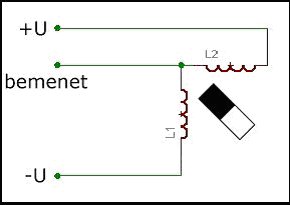
Kétféle alapvető megoldás létezik a felépítést illetően. Az egyik megoldás a kereszttekercses motor elve, amikor a két tekercs sorba van kötve, és azokon állandó áram folyik. Ezzel az árammal generált mágneses térrel tartják középpontban az eltérítő tengelyét, és a tekercsek középpontjának elhúzásával, lehet egyik és másik irányba eltéríteni a tengelyre szerelt tükröt. Ez gyakorlatilag félig meddig léptető motoros eljárás, nagy lépésközű léptető motorokkal ezt meg is lehet valósítani
Ezzel a megoldással több probléma is van. Sajnos az első és legfontosabb probléma, amit nem is lehet el hanyagolni, a hőtermelés, és a veszteség. Ebben a kapcsolásban a tekercseken gyakorlatilag folyamatosan folyik egy gerjesztő áram, ami fűti az eltérítőt, és jelentős teljesítmény válik hővé még akkor is, ha az eltérítő abszolút meg se mozdul. Másik problémája, hogy a nagy nyomaték eléréséhez, meglehetősen nagy mágneses tömeg tartozik, így a szkenner sebessége alig éri el az 50 Hz-es működési frekvencia tartományt, és ez a határérték sokszor nagyon kevés.

A másik megoldás a galvanométer elvén működő eltérítő rendszer. Az előző kereszttekercses eltérítéssel szemben, a galvanométeres elv annyiban különbözik, hogy itt nem folyik a tekercseken állandó áram, tehát amikor a szkenner középálláshoz visszatér, akkor az egész áramkör nyugalomban van. Bár ennél a megoldásnál a közép állapotba való visszaállítás nehézkes, pontosabban ezzel adódnak a legtöbbször problémák. A probléma pedig ott jelentkezik, hogy valamilyen rugós, vagy elektromos visszatérítést kell alkalmazni, és ez túllendülhet könnyedén a visszaálláskor. Ezzel nem is lenne baj, hiszen a kereszttekercses szkenner is túllendül, viszont a rugós visszatérítés bizonyos frekvenciákon rezgőkörként lép fel, és a mechanika önrezgésbe kezd, valamint az elektronikailag stabilizált szkennernek is van önrezgése, amit a különböző kompenzáló tagok hivatottak csillapítani. A mindennapi gyakorlatban ezt a fajta szkenner felépítést használják. Típustól, technológiától és kiviteltől függően akár 5-6 kHz-es határfrekvenciát is el lehet vele érni, persze megfelelő elektronikával, és kompenzációval. A szkenner felépítésénél, bármilyen is legyen az, a legfontosabb a súly és a méret megfelelő megválasztása. Értelemszerűen, kicsi súly, kicsi méret.
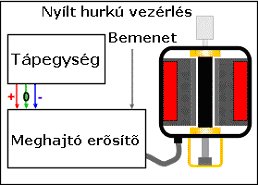
A vezérlés esetében a számítógép egymás után adja a koordináta pontokat a szkennernek, és az próbálja követni ezeket az utasításokat. Persze a szkenner tehetetlenségéből adódóan, és a mechanikai sebesség korlátok miatt nem biztos, hogy pont oda ugrik a fénypont, ahová azt mi szeretnénk, illetve ahová a programban megadjuk. Tehát elképzelhető, hogy az általunk megadott koordináta pontokat csak részben, vagy egyáltalán nem követi a lézer sugár által vetített fénypont. Ilyen esetekben különböző kompenzációs eljárásokkal lehet a kívánt helyre terelni a fénypontot. Például lehet a programban kompenzálni a koordinátákat vagy az elektronikán, és a mechanikán állítani (rugóerő, túllövés erősítés stb. ) . Ezt a vezérlési módot nyílt hurkú vezérlésnek mondják a szakirodalmak.

A vezérlés másik módja, szintén az analóg jel átviteléig ugyanazon az elven működik, de az analóg erősítésnél vissza van csatolva a rendszer. Ezért ezt zárt hurkú vezérlésnek hívják. Gyakorlatilag ez inkább szabályzás, mivel egy Proporcionális Integráló Differenciáló áramkör, rövid nevén PID szabályzó segít a korrekcióban. Működésének lényege abban rejlik, hogy az áramkör mindig pontosan tudja, hogy a szkenner éppen milyen pozíciónál tart, és ha esetleg megpróbálna túl ugrani, vagy nem oda érni, akkor utána szabályoz, még mielőtt a következő koordináta pontot megkapná a szkenner. A zárt hurkú szabályzásnál szinte mindegy, hogy szkenner milyen technikai paraméterekkel rendelkezik, mivel az elektronika kompenzálja a hibákat.

De ez csak elméletben működik, valójában azért nem lehet minden problémát kiküszöbölni, mert a motor mozgó tömegeinek tehetetlenségét sajnos nem lehet pusztán elektronikával kompenzálni, és persze a sebesség is ebből adódik. Tehát hiába van egy nagyon pontos elektronika, ha egyszerűen fizikailag a motor nem képes követni azt a sebességet. Mert az elektronika ugyan szabályozza a motorra adott feszültséget és áramot, de a végtelenségig azt sem lehet növelni. Minden esetben törekedni kell a minél kisebb súlyokra, a minél erősebb mágnesre, a kicsi légrésre, és természetesen a forgásponttól való tömeg távolság a legfontosabb, az igen kis nyomaték miatt. A következő ábra az egyes vezérlések beállási idejét hivatott bemutatni grafikon formájában. A háromféle mód közötti különbség jól látható.